APHROS Autonomous Persistent Hoving Robot Operating System
|
Summer 2012 - Fall 2012
We are working with Ocean Alliance, a nonprofit organization which monitors the health of whales around the world, to design a new method of collecting biological samples. Currently, biological samples are taken using a special arrow launched from a crossbow which captures a small skin specimen. The process is expensive, time-consuming, an these samples are effectively limited to DNA analysis.
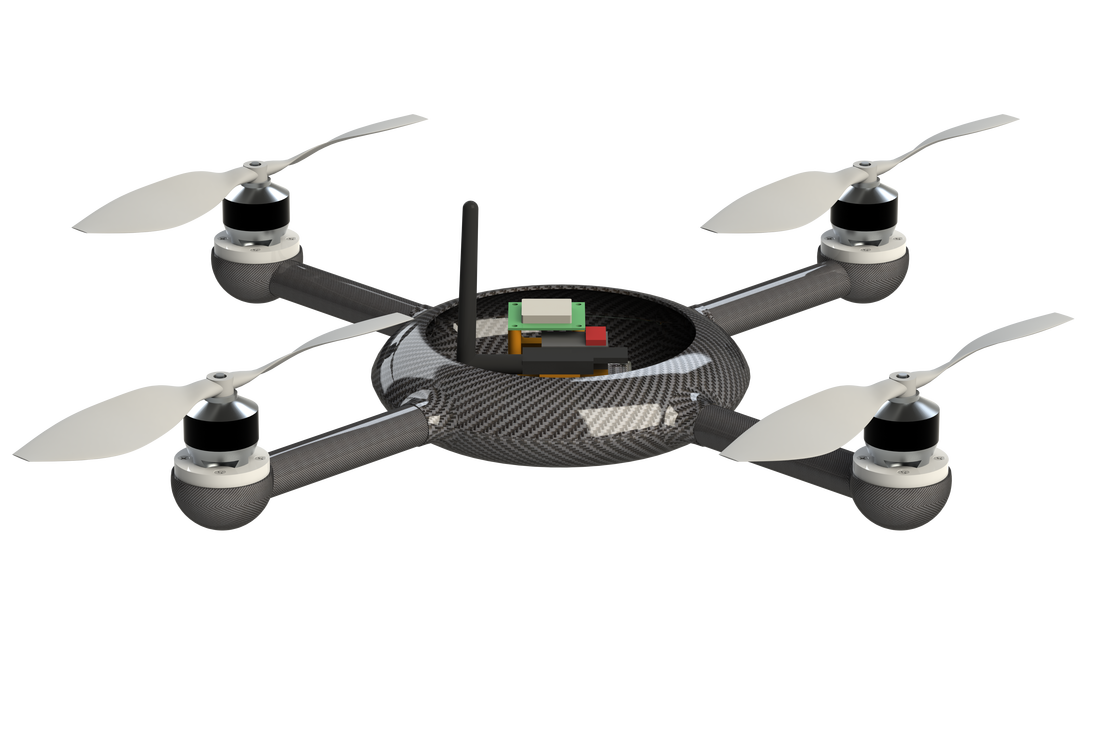
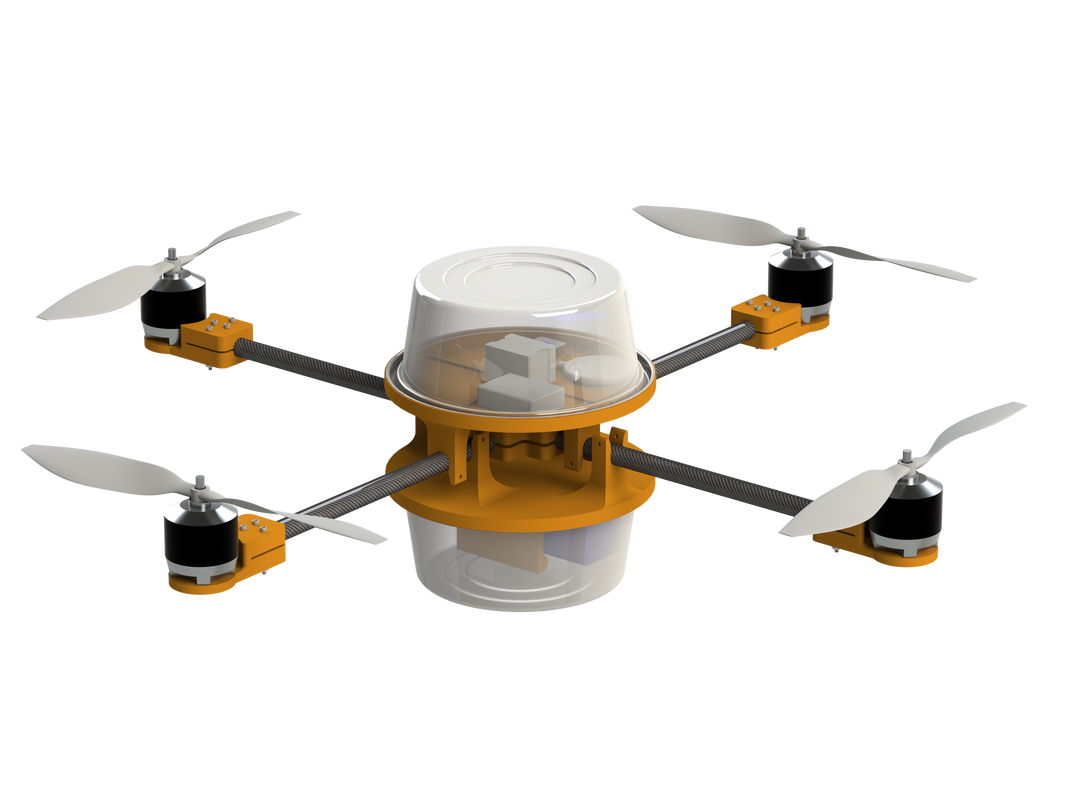
We are creating mutlicopter specifically designed to fly above whales as they surface, collect mucus from their expelled blow, and to return directly to the research vessel. I am designing and fabricating a salt water proof quadcopter capable of carrying our mucus collecting mechanisms. |
